-- Aiding Children with Disabilities through Total Design
Principal Investigators: Dr. Yu Zhou, Dr. Qiaode Jeffrey Ge, and Dr. Lisa M. Muratori
The Rumble Aide
Designers: Safid Bakar, Juan Pinales, Edgar Suarez and Matthew Walker
Supervising Professor: Dr. Christopher Weyant
Department of Materials Science and Engineering
State University of New York at Stony Brook
Stony Brook, NY 11794
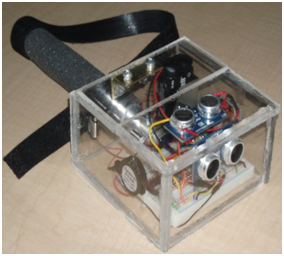
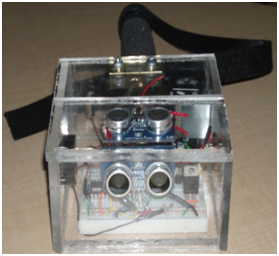
Figure 1. Prototype of the Rumble Aide
INTRODUCTION
The goal of this design is to create a travel aid device for visually impaired people. The Rumble Aide consists of two ultrasonic sensors to detect frontal and overhead obstacles and provide comprehensive assessment of the user’s surroundings. Depending on the proximity of a frontal obstacle, the device will provide haptic feedback or vibrate; and if there is an overhead obstacle, the device will provide auditory feedback or “buzz”. It was designed to improve the range of awareness provided by exiting solutions such as traditional canes and guide dogs.
SUMMARY OF IMPACT
The Rumble Aide design is a compact, light-weight and user-friendly obstacle detection device. It is capable of both overhead and frontal detection of objects, each with a distinct feedback mode for easy differentiation. Comparing with other aide systems such as canes and dogs, our device provides a much broader obstacle detection range, has a comparable or even longer lifespan of usage, and requires little maintenance. This device is able to improve the quality of life for visually impaired people by helping them move around independently with wider object detection capability.
TECHNICAL DESCRIPTION
The Rumble Aide consists of two ultrasonic sensors, four motors and a buzzer controlled by a BASIC Stamp 2e Module microcontroller with a 9V battery as a power source. Additional components include N-Channel MOSFETs and voltage regulators.
The 9V battery power source is transformed to proper voltage inputs for the vibration motors (which run on 3V) and the ultrasonic sensors (which run on 5V). The 3V for the vibration motors is obtained by passing the 9V through an adjustable voltage regulator (which has been set to provide a maximum of 3V). The 5V for the ultrasonic sensors is obtained by passing the 9V through a constant 5V voltage regulator.
The microcontroller controls the two ultrasonic sensors (which are capable of sensing from 2cm to 3m). Each ultrasonic sensor has two components: a transmitter and a receiver. The transmitter sends short ultrasonic signals, and the receiver collects the signals reflected back by nearby objects. The P-BASIC programming in the BASIC Stamp converts the signal traveling time into distances. Then the microcontroller triggers the motors or the buzzer depending on the location of the obstacle. If the obstacle is frontal, the motors will vibrate. The intensity of the vibration depends on the proximity of the obstacle, with all motors vibrating when an obstacle is within two feet of the user and one motor vibrating if the obstacle is four to seven feet from the user. If the obstacle is overhead (close to the head), the buzzer will ring.
The electronic components are enclosed in a homemade PMMA casing. A handle protrudes from the back, made of an aluminum rod covered with PE foam, and a strap was designed to provide extra support to the user.
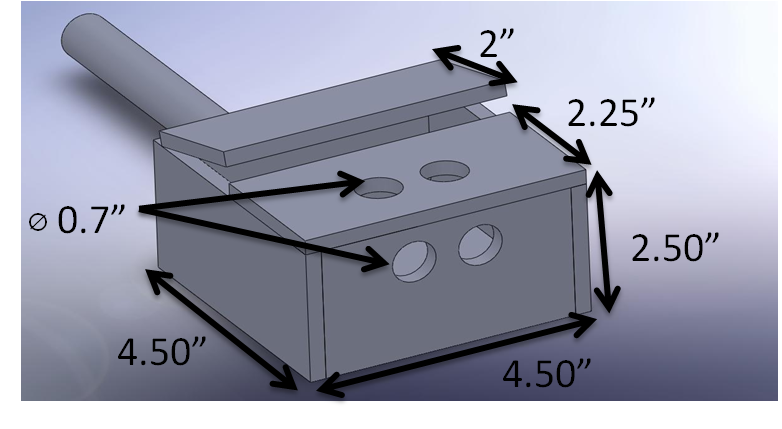
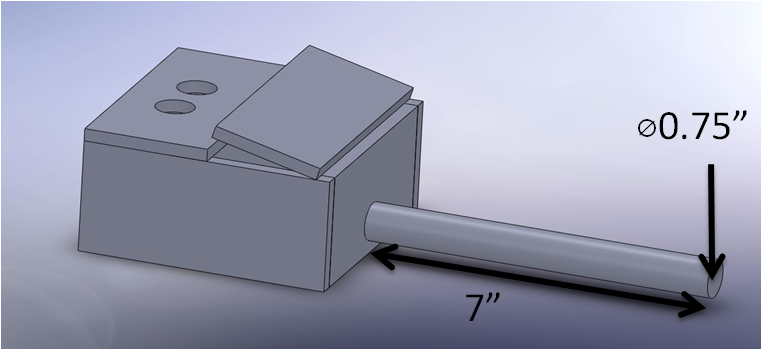
Figure 2. Casing of the Rumble Aide